Điều đặc biệt ở 'cánh tay robot' đạt giải quốc tế của học trò Bắc Ninh
Sáng chế "Cánh tay robot cho người khuyết tật" của Phạm Đức Linh và Nguyễn Đức An (lớp 11A4, Trường THPT Hàn Thuyên, Bắc Ninh) là dự án duy nhất của học sinh Việt Nam giành giải chính thức ở cuộc thi Khoa học kỹ thuật quốc tế 2021.
Cụ thể, dự án “Cánh tay robot cho người khuyết tật liệt cơ tay toàn phần" đã xuất sắc giành giải Ba ở lĩnh vực Kỹ thuật Cơ khí cùng 1.000 USD tiền thưởng.
Đây cũng là lần đầu tiên học sinh Bắc Ninh đoạt giải ở cuộc thi Khoa học kỹ thuật quốc tế (ISEF).
"Em thật sự hạnh phúc những cũng rất bất ngờ. Lúc ngồi xem công bố giải, em không tin nổi vào mắt mình và phải tua đi tua lại đoạn 2 đứa được xướng tên đến mấy lần mới dám tin. Sau đó, 2 đứa đã nắm tay nhau, nhảy cẫng lên vì sung sướng", Linh nhớ lại.
Theo Linh, dự án “Cánh tay robot cho người khuyết tật liệt cơ tay toàn phần” được ban giám khảo đánh giá cao về ý tưởng, phương pháp điều khiển mới bằng chân cũng như tính nhân văn hướng đến.
Sử dụng biên độ co duỗi của ngón chân để điều khiển cánh tay
Nói về lý do lựa chọn đề tài nghiên cứu này, đôi bạn cho hay ý tưởng nảy sinh khi các em chứng kiến các bác thương binh, những người không may bị tai nạn khiến cụt hoặc liệt tay, gặp nhiều khó khăn trong sinh hoạt và lao động. Đặc biệt là nhiều người còn trẻ và đang trong độ tuổi lao động. Để giúp họ có cuộc sống bình thường mà không phải phụ thuộc vào người khác, đôi bạn thân Đức Linh và Đức An đã quyết tâm tạo ra một sản phẩm hỗ trợ hữu ích.
 |
| Phạm Đức Linh và Nguyễn Đức An (học sinh Trường THPT Hàn Thuyên, tỉnh Bắc Ninh) giành giải Ba cuộc thi Khoa học kỹ thuật quốc tế với dự án “Cánh tay robot cho người khuyết tật liệt cơ tay toàn phần”. |
Theo Linh, trước đây, có nhiều ý tưởng, mô hình và sản phẩm về cánh tay robot, như sử dụng sóng não, cơ bắp, giọng nói,... để điều khiển.
Tuy nhiên, với những người liệt cơ tay toàn phần hay có phần mỏm tay còn lại ngắn, hầu như không thể sử dụng được các cánh tay robot trên thị trường. Thực tế đó đã thôi thúc đôi bạn có ý tưởng chế tạo cánh tay robot cho người khuyết tật liệt cơ tay hoàn toàn.
"Khi bắt tay vào nghiên cứu, chúng em thấy đã từng có rất nhiều phương pháp khác nhau để điều khiển cánh tay robot. Các cánh tay chủ yếu dùng sóng não, múi cơ còn sót lại trên phần dư cánh tay hoặc dùng giọng nói để điều khiển, nhưng chúng em thấy các phương pháp này đòi hỏi sản phẩm phải được thiết kế riêng biệt, cá nhân hóa cho từng người dùng. Tìm hiểu kĩ hơn, chúng em thấy một dự án Cánh tay robot năm 2017 của anh Phạm Huy (cựu học sinh Trường THPT thị xã Quảng Trị, Quảng Trị) có sử dụng chân để điều khiển. Chúng em thấy ý tưởng dùng chân để điều khiển rất hay và quyết định phát triển theo hướng này, nhưng nhất định phải tìm ra điểm mới".
 |
| Em Phạm Đức Linh. |
Trăn trở từ năm lớp 10, đôi bạn lao vào thử nghiệm và nghĩ ra một phương pháp mới: Sử dụng biên độ co duỗi của ngón chân để điều khiển cánh tay.
"Nếu mới nghe qua tên đề tài thì nhiều người nghĩ là trùng lặp ý tưởng nhưng thực chất dự án năm 2017 với dự án của chúng em khác biệt rất rõ. Cánh tay robot năm 2017 dùng hệ thống nút bấm đặt phía dưới ngón chân để nhấn điều khiển. Tuy nhiên, nhược điểm là gặp khó khăn khi di chuyển, lái xe ô tô. Do vậy, chúng em nghĩ ra giải pháp mới là sử dụng biên độ co duỗi của ngón chân để điều khiển", Linh nói.
 |
| Em Nguyễn Đức An. |
An giải thích nguyên lý của sản phẩm của nhóm là có 2 hộp điều khiển, mỗi hộp được đeo vào phần cẳng chân và kết nối với một bộ phận cảm biển đặt bên trên ngón chân cái để thu tín hiệu độ bẻ cong. Khi người dùng co duỗi ngón chân, các tín hiệu độ cong sẽ được xử lí để truyền tín hiệu không dây điều khiển cánh tay robot. Các làm này giúp cho người dùng thuận tiện hơn khi đi lại mà vẫn đảm bảo cánh tay thực hiện được tốt các thao tác cần nắm cơ bản cho người khuyết chi. Ngoài ra cánh tay còn giúp cho người sử dụng cảm nhận được tín hiệu lực trên đầu ngón tay bằng động cơ rung và còn tích hợp được tính năng xoay cổ tay, gập duỗi khuỷu tay vốn dĩ rất hiếm trên thị trường.
Gần 2 năm để hoàn thành
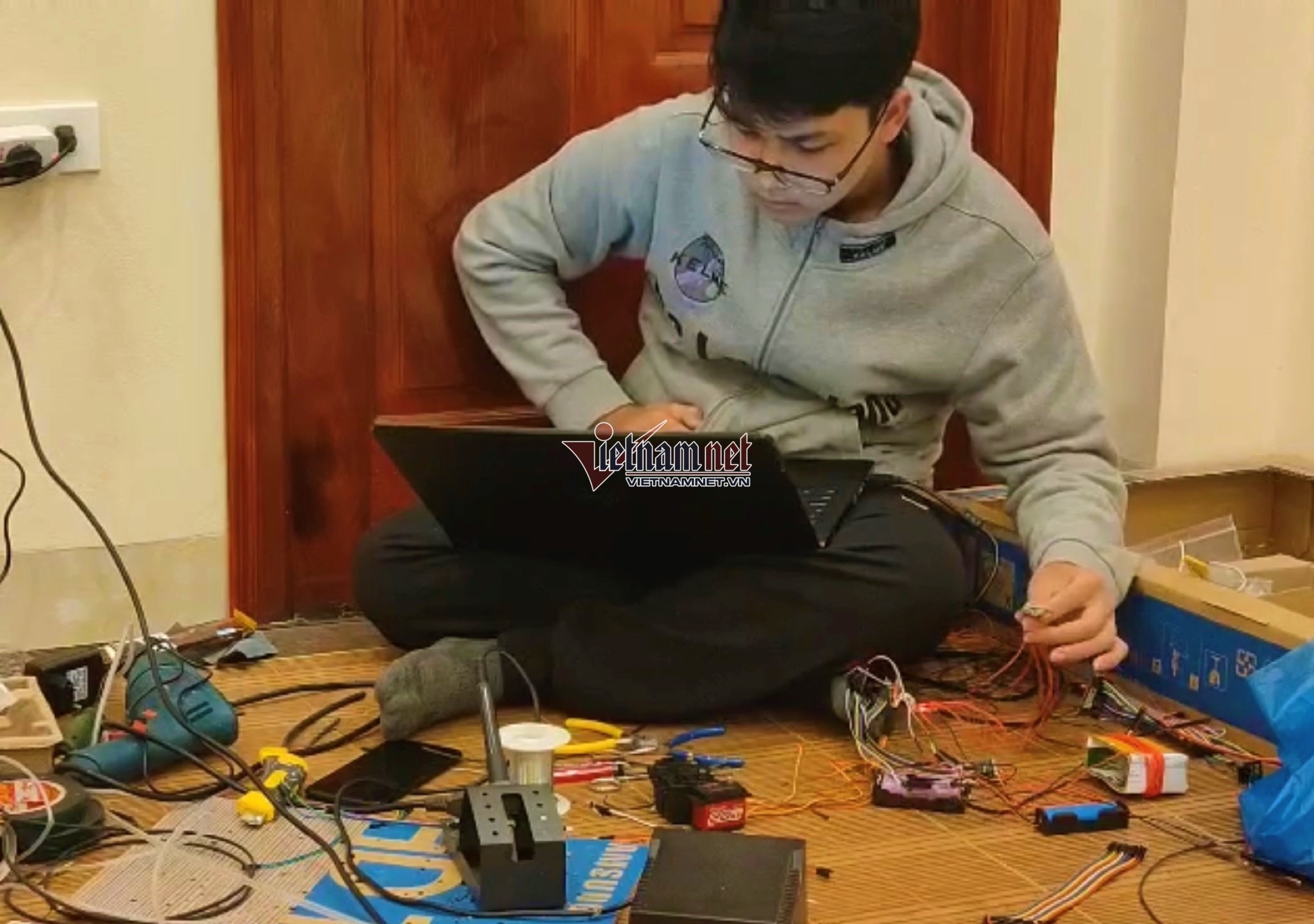
Để đến được ngày hôm nay, đôi bạn đã bắt tay thực hiện ý tưởng từ giữa năm 2020 và có kế hoạch cụ thể trong việc phân tích ưu nhược điểm của các phương pháp, tham khảo về lập trình và đồ họa, tìm tài liệu liên quan đến cảm biến, lựa chọn vật liệu, linh kiện điện tử, thiết kế bản in 3D cánh tay robot, rồi lắp đặt và thử nghiệm thiết bị.
An cho biết, dự án đã mất gần 2 năm để hoàn tất mọi quá trình, từ lên ý tưởng, thử nghiệm, sửa đổi, hoàn thiện sản phẩm. "Dự án luôn được dự tính làm trong thời gian rất ngắn, nhưng rồi đầy rẫy những vấn đề phát sinh cần giải quyết. Cánh tay robot của chúng em được in 3D toàn bộ nên mỗi lần thử nghiệm bị lỗi là phải in lại bản mới. Từ lúc bắt đầu dự án tới giờ đã có tới 4 nguyên mẫu với 23 lần in 3D", An nói.
 |
Đôi bạn vẫn nhớ cảnh mỗi lần bị cháy mạch hay hỏng hóc, thường phải đi sang Hà Nội để mua linh kiện.
"Thời gian gần thi cấp quốc gia, có tuần, ngày nào chúng em cũng phải đi để tìm linh kiện. Ngoài ra, để làm báo cáo đề tài cho dự án, chúng em cần phải tìm ra những tài liệu thật chính xác, một số tài liệu còn mất phí nên rất khó để tìm đọc". Mặc dù vậy, Linh cho rằng đây cũng là cơ hội để tìm hiểu về những điều mới, xa lạ cũng như biết cách chắt lọc thông tin trên internet.
Cũng nhờ vậy mà các em đã quen dần và hiểu rõ hơn về từng thao tác trình bày văn bản trên máy tính, làm đồ thị, vẽ hình minh họa,… Ngoài ra, để chế tạo cánh tay, đôi bạn đã tự học cách sử dụng phần mềm chuyên thiết kế bản vẽ 3D như Blender, vẽ mạch trên Fritzing cũng như lập trình trên Arduino,…
 |
Đôi bạn cho hay, tổng chi phí để tạo nên cánh tay robot khoảng 9,5 triệu đồng, song những thứ phát sinh khi chế tạo là tốn kém hơn cả, gồm kinh phí để thử nghiệm, sửa đổi, tái sửa đổi, rồi in lại nguyên mẫu 3D, mua mạch do quá dòng cháy mạch, chi phí đi lại để mua linh kiện,…
 |
Sắp tới, An dự tính vào Trường ĐH Bách khoa Hà Nội, còn Linh muốn vào Học viện Kỹ thuật quân sự. Tuy vậy, cả hai cho hay sẽ tiếp tục cùng nhau nhau phát triển các ý tưởng và theo đuổi đam mê nghiên cứu khoa học.
Thanh Hùng - vietnamnet.vn

Xem thêm